


รายละเอียดสินค้า
| ข้อมูล |
น้ำหนัก
บาร์โค้ด
ลงสินค้า
อัพเดทล่าสุด
|
| รายละเอียดสินค้า |
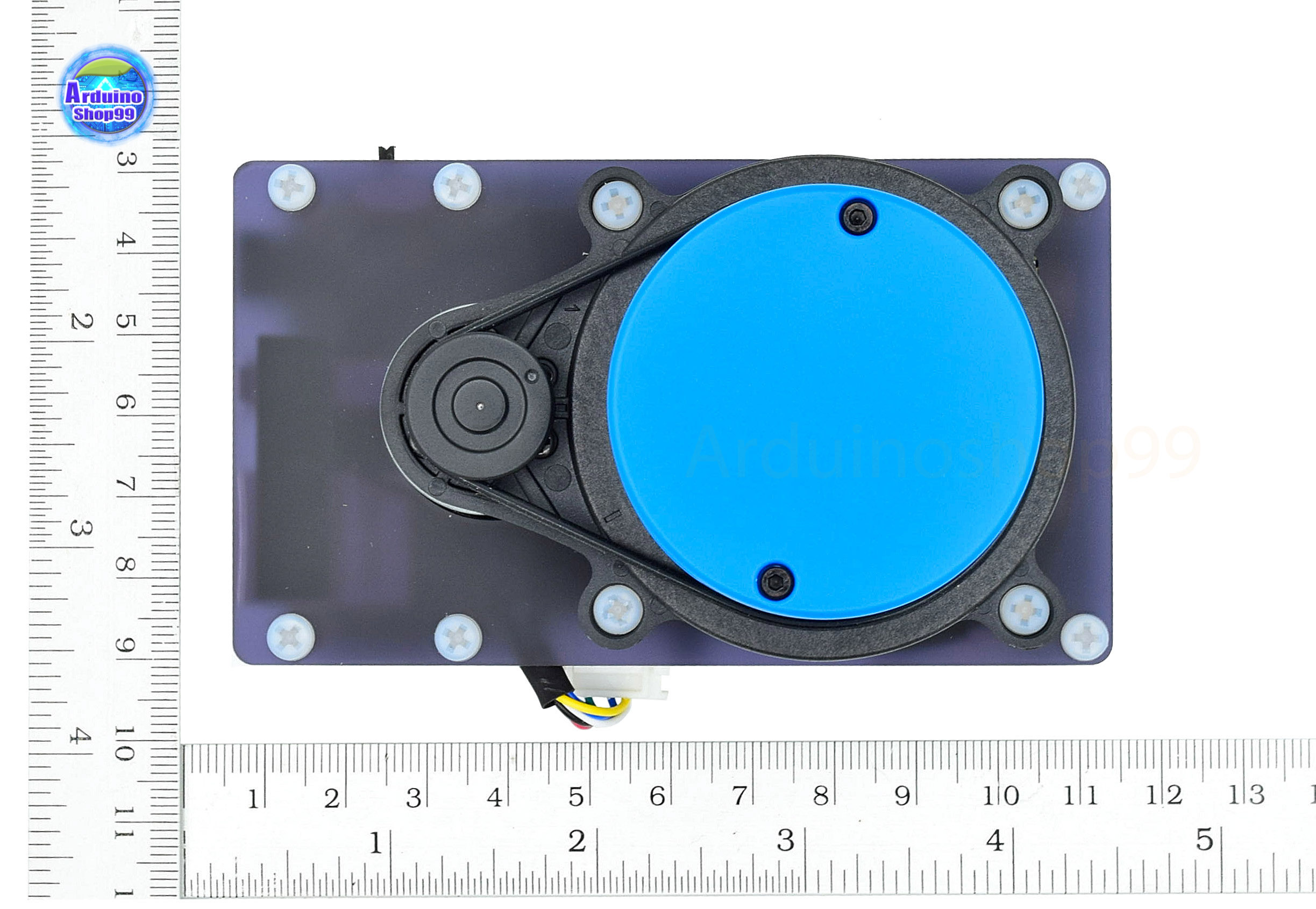
Spot TOF 20m SLAMTEC MAPPER M1M1-360 ° lidar mapping sensor
INTRODUCTION
SLAMTEC MAPPER M1M1-360°Laser Mapping Sensor TOF 20m is a new laser range scanner category with built-in mapping and localization feature.
Slamtec Mapper, a new laser range scanner category integrating map building and real time localization and navigation, contains the SLAMTEC third generation high-performance SLAM engine and laser range scanner. http://www.slamtec.com/en/Lidar/Mapper คู่มือการใช้งาน 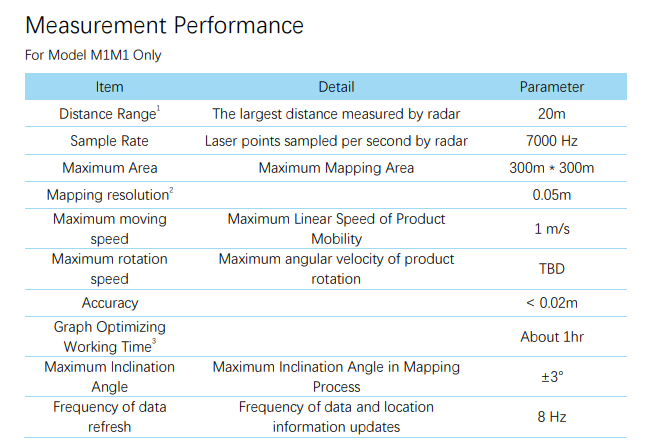 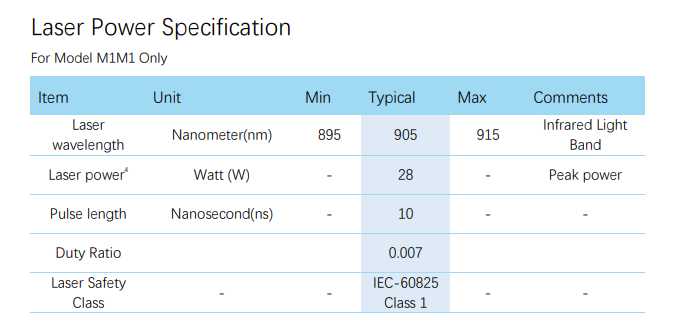 การใช้งานเบื้องต้น ขั้นตอนที่ 1: เชื่อมต่อ
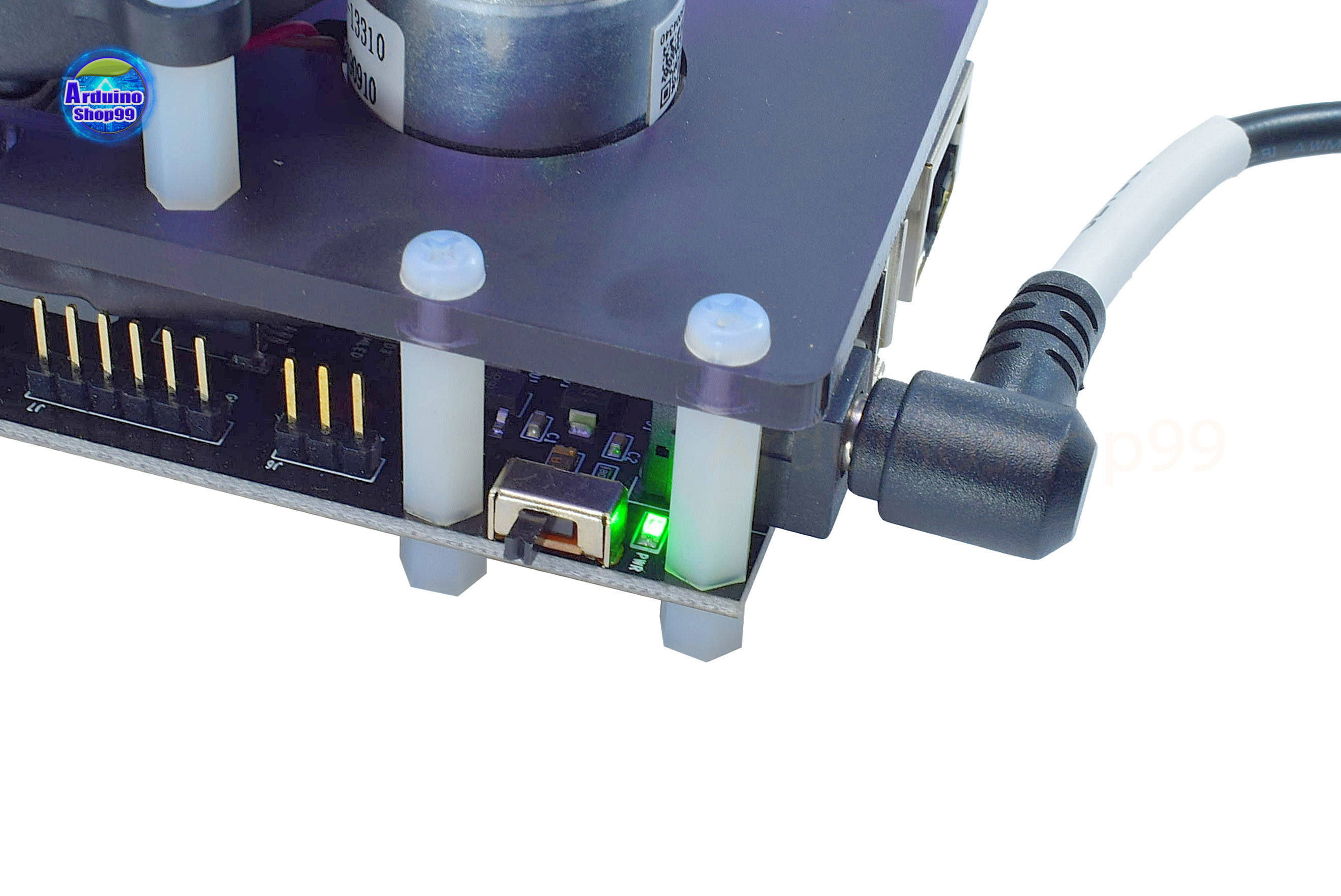
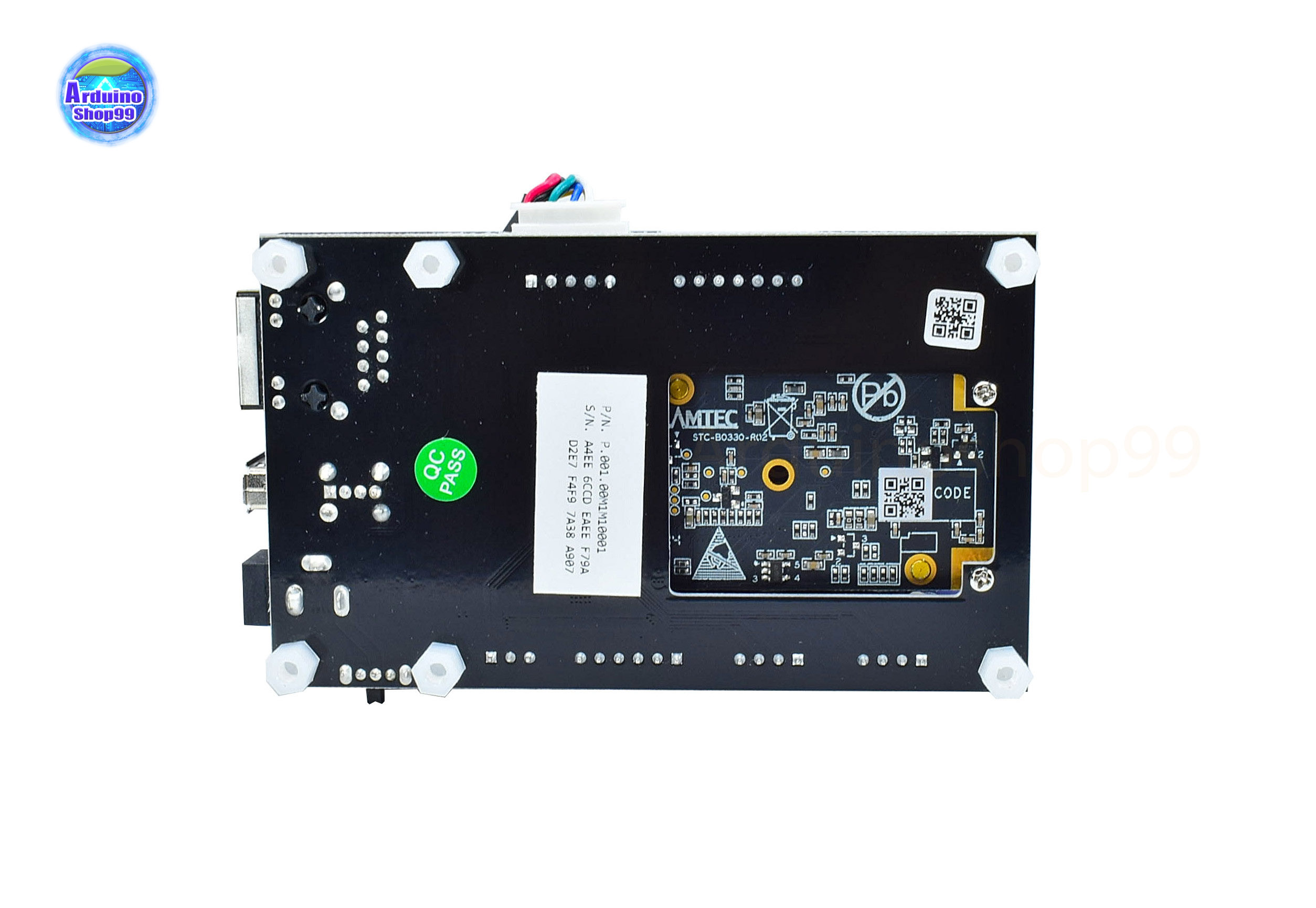
ส่วนประกอบของ SLAMTEC MAPPER M1M1 มีเซนเซอร์และสายไฟใช้ต่อกับ USB คอมพิวเตอร์ 5 v ได้
 ต่อสายให้สนิทดังรูป  ขั้นตอนที่ 2: เริ่มต้นและเชื่อมต่อกับคอมพิวเตอร์
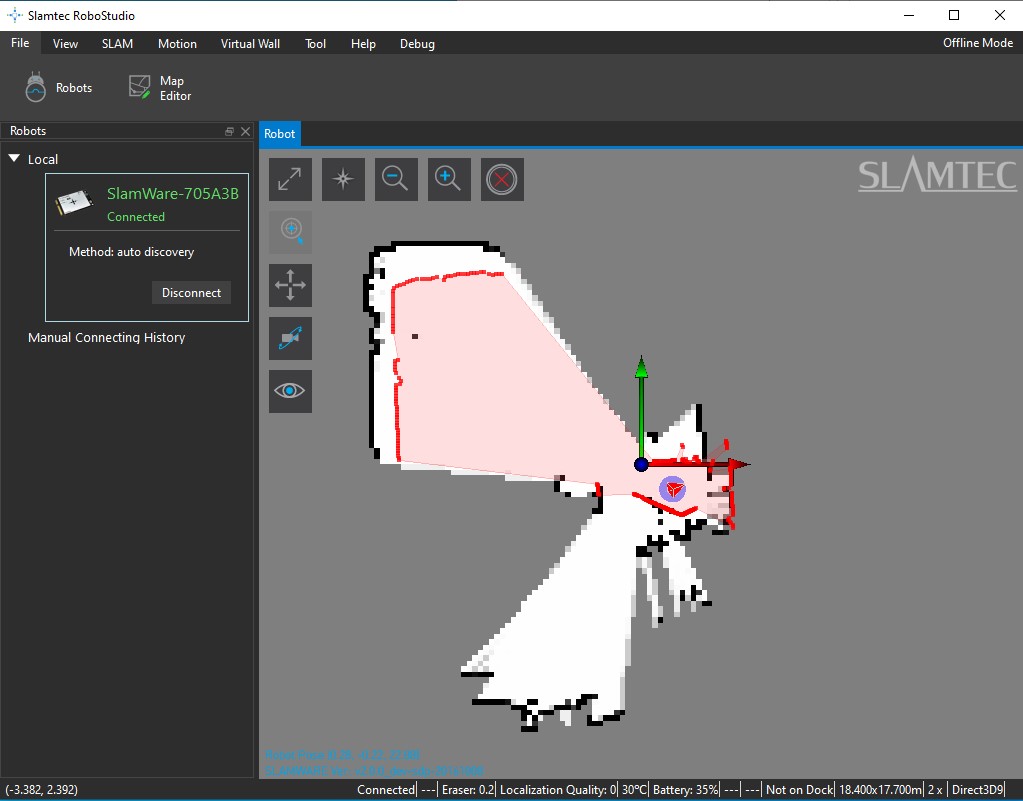
เปิดสวิตช์ (SW1) เพื่อเริ่มการทำงานของอุปกรณ์ไฟจะแสดงสถานะ (D1) สีเขียว จะสว่างขึ้น รอประมาณ 20 วินาที SLAMTEC MAPPER จะเริ่มต้นการหมุน ซึ่งบ่งชี้ว่าอุปกรณ์เริ่มทำงานอย่างถูกต้องแล้วหลังจากเริ่มต้นจะพบ SLAMWARE-XXXXXX WiFi ที่จอคอมพิวเตอร์(WiFi Auto)
 เมื่อพบ WiFi SLAMWARE-XXXXXX ที่จอคอมพิวเตอร์ .ให้ทำการกดเชื่อมต่อ ที่ connect 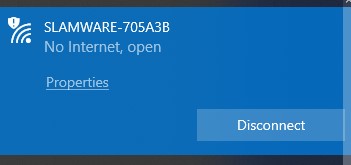 ขั้นตอนที่ 3: ดาวน์โหลด RoboStudio
ดาวน์โหลด Robostudio จากเว็บไซต์
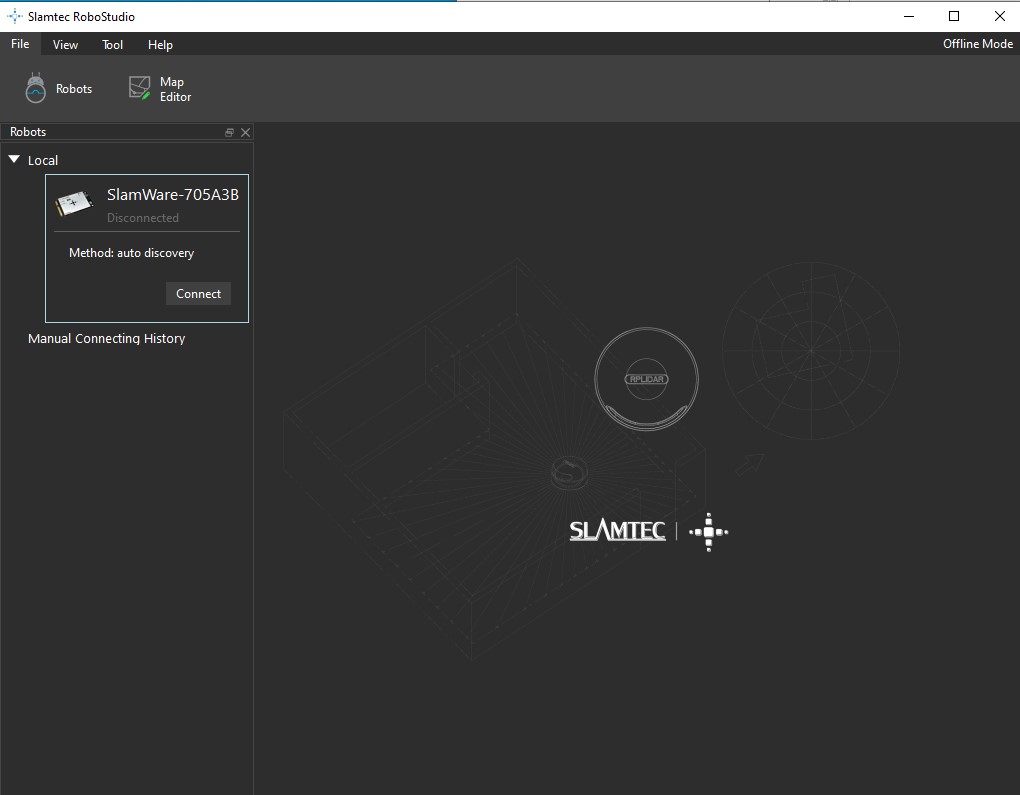
แล้วเริ่มติดตั้งการทำงานของแอพลิเคชัน RoboStudio คลิกขวาที่แผงหุ่นยนต์และเลือก
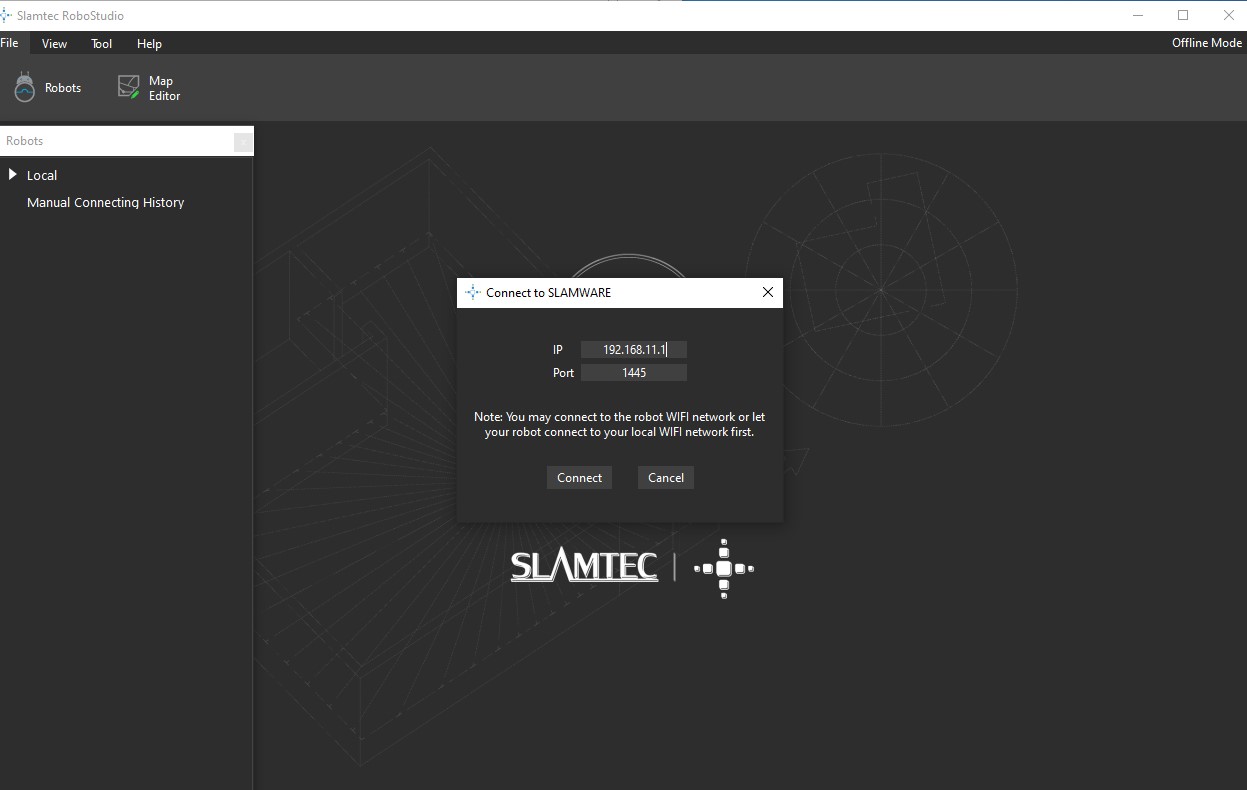
เชื่อมต่อ ใช้ 192.168.11.1 สำหรับที่อยู่ IP และ1445 สำหรับพอร์ต (ตั้งค่าเริ่มต้น)
              |
| เงื่อนไขอื่นๆ |
|
| Tags |
วิธีการชำระเงิน

ชำระเงินผ่านธนาคาร
ชำระเงินด้วยการ Scan QR



สนธยา ใจผ่อง
063-xxxxxx-8
Accept All Banks | รับเงินได้จากทุกธนาคาร




สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
รวมภาษีมูลค่าเพิ่มแล้ว
➜ เลือกซื้อสินค้าเพิ่ม