


รายละเอียดสินค้า
| ข้อมูล |
น้ำหนัก
บาร์โค้ด
ลงสินค้า
อัพเดทล่าสุด
|
| รายละเอียดสินค้า |
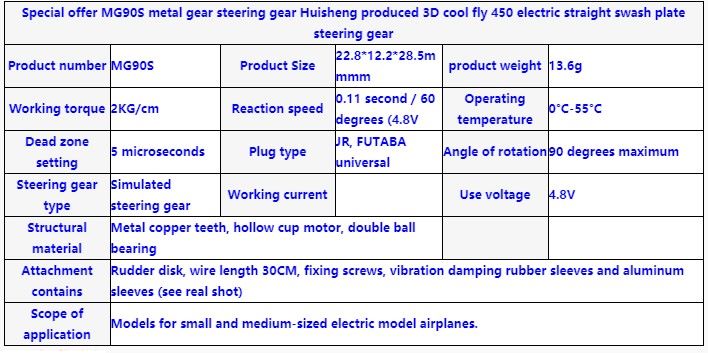
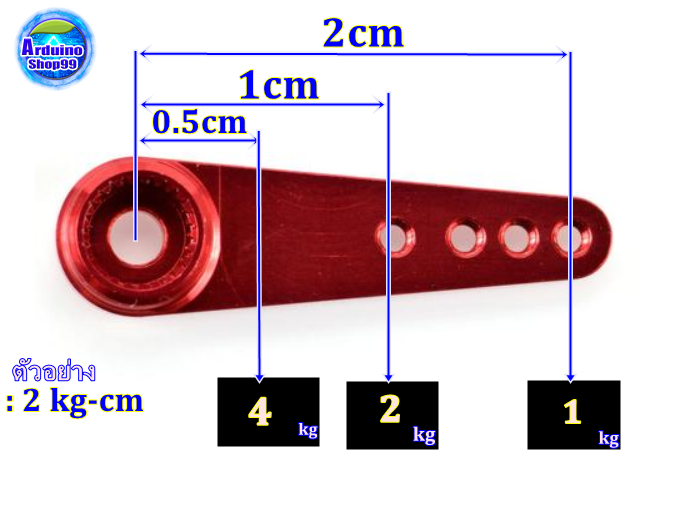
เซอร์โว Tower pro MG90S Digital หมุนได้ 0-200 องศา แรงบิด 2 kg/cm (4.8V) เฟืองโลหะ
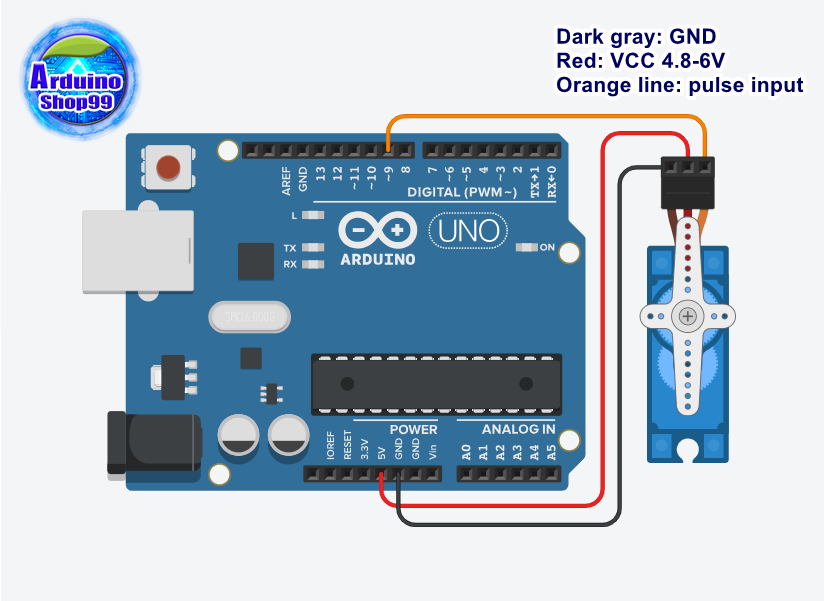
The steering gear has three line definitions:
Dark gray: GND Red: VCC 4.8-7.2V Orange line: pulse input code:
/* Sweep
by BARRAGAN <http://barraganstudio.com>
This example code is in the public domain.
modified 8 Nov 2013 by Scott Fitzgerald
http://www.arduino.cc/en/Tutorial/Sweep
*/
#include "Servo.h"
int pos = 0;
Servo servo_9;
void setup()
{
servo_9.attach(9);
}
void loop()
{
// sweep the servo from 0 to 180 degrees in steps
// of 1 degrees
for (pos = 0; pos <= 180; pos += 1) {
// tell servo to go to position in variable 'pos'
servo_9.write(pos);
// wait 15 ms for servo to reach the position
delay(15); // Wait for 15 millisecond(s)
}
for (pos = 180; pos >= 0; pos -= 1) {
// tell servo to go to position in variable 'pos'
servo_9.write(pos);
// wait 15 ms for servo to reach the position
delay(15); // Wait for 15 millisecond(s)
}}
      |
| เงื่อนไขอื่นๆ |
|
| Tags |
วิธีการชำระเงิน

ชำระเงินผ่านธนาคาร
ชำระเงินด้วยการ Scan QR



สนธยา ใจผ่อง
063-xxxxxx-8
Accept All Banks | รับเงินได้จากทุกธนาคาร




สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
รวมภาษีมูลค่าเพิ่มแล้ว
➜ เลือกซื้อสินค้าเพิ่ม