


รายละเอียดสินค้า
| ข้อมูล |
น้ำหนัก
บาร์โค้ด
ลงสินค้า
อัพเดทล่าสุด
|
| รายละเอียดสินค้า |
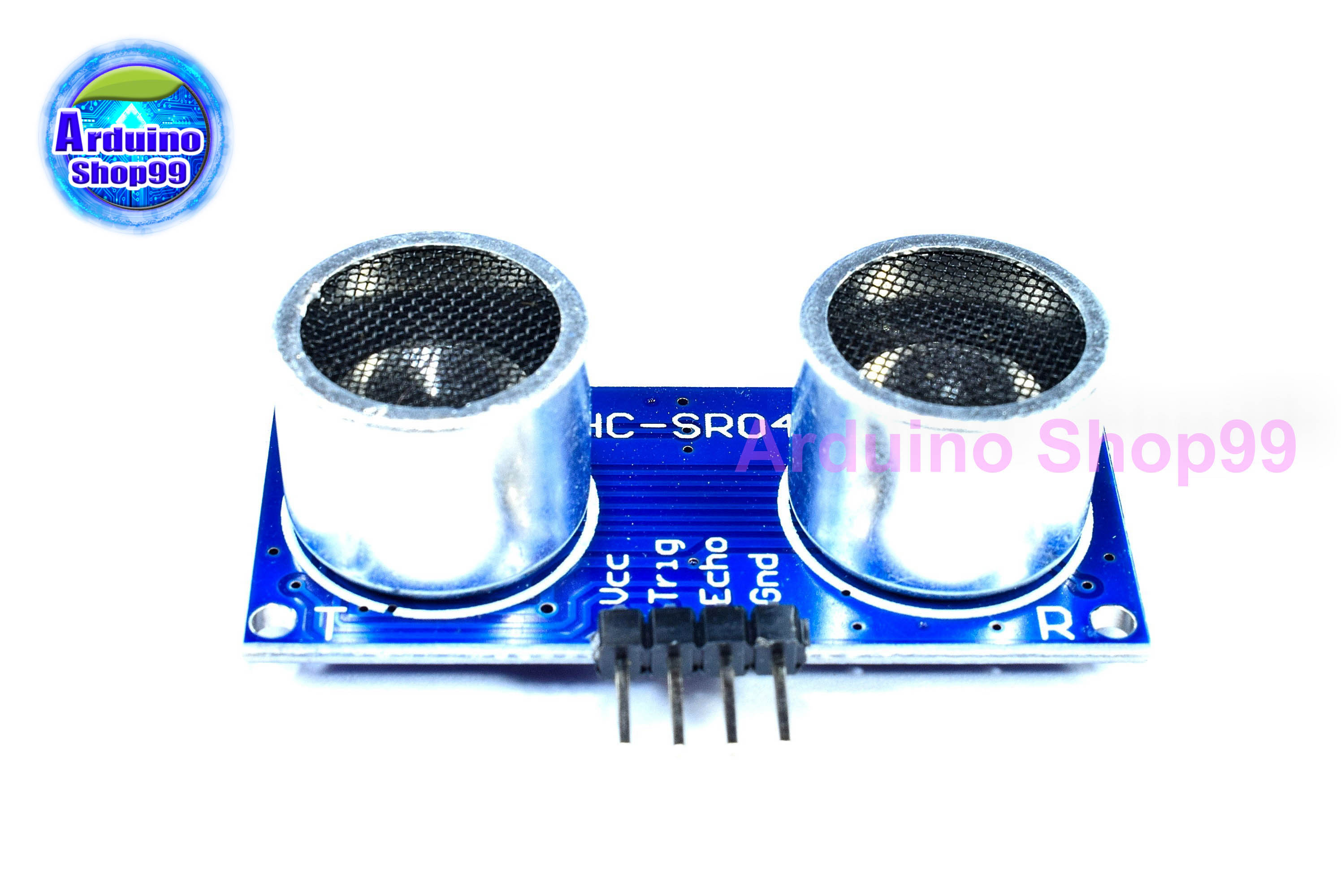
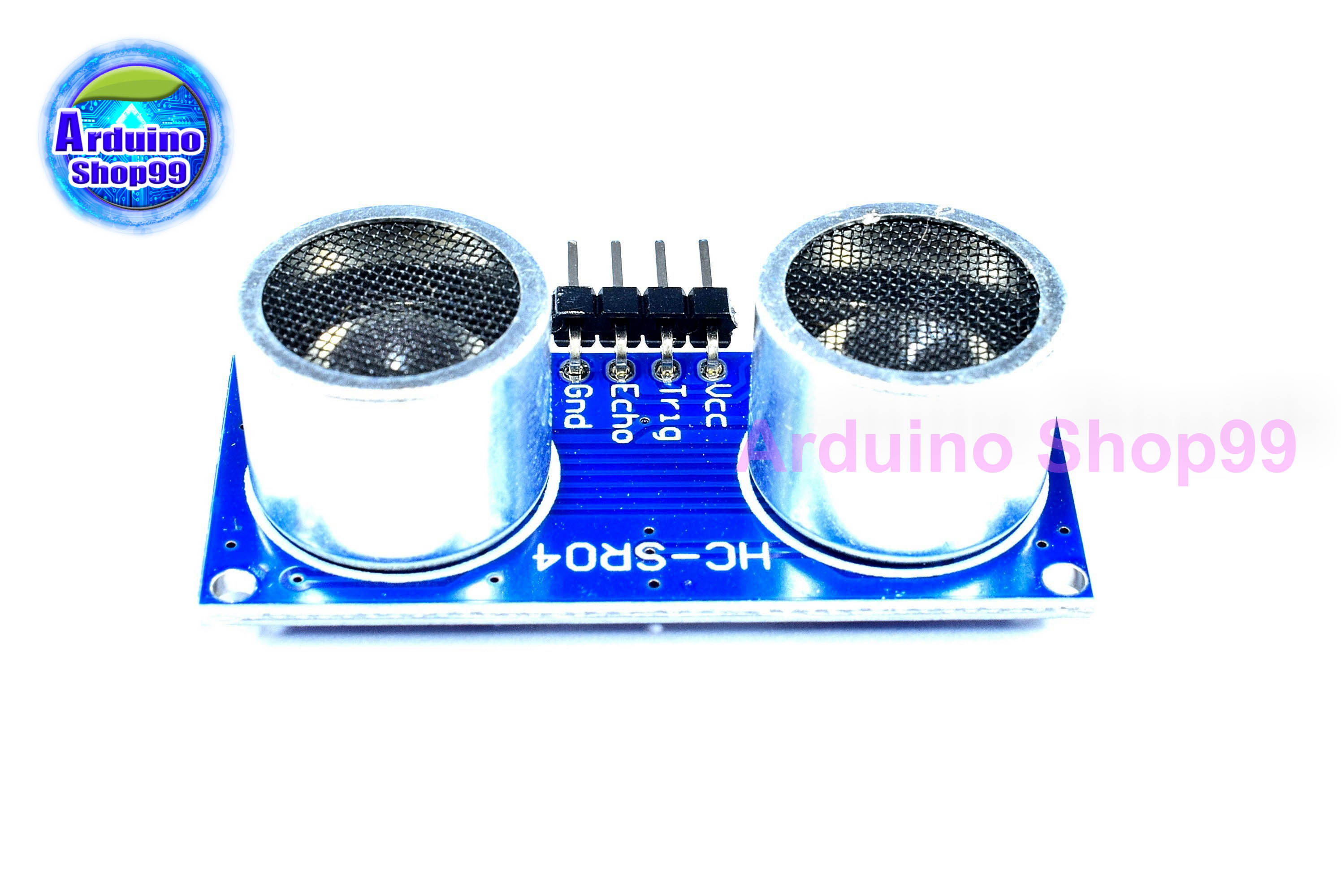
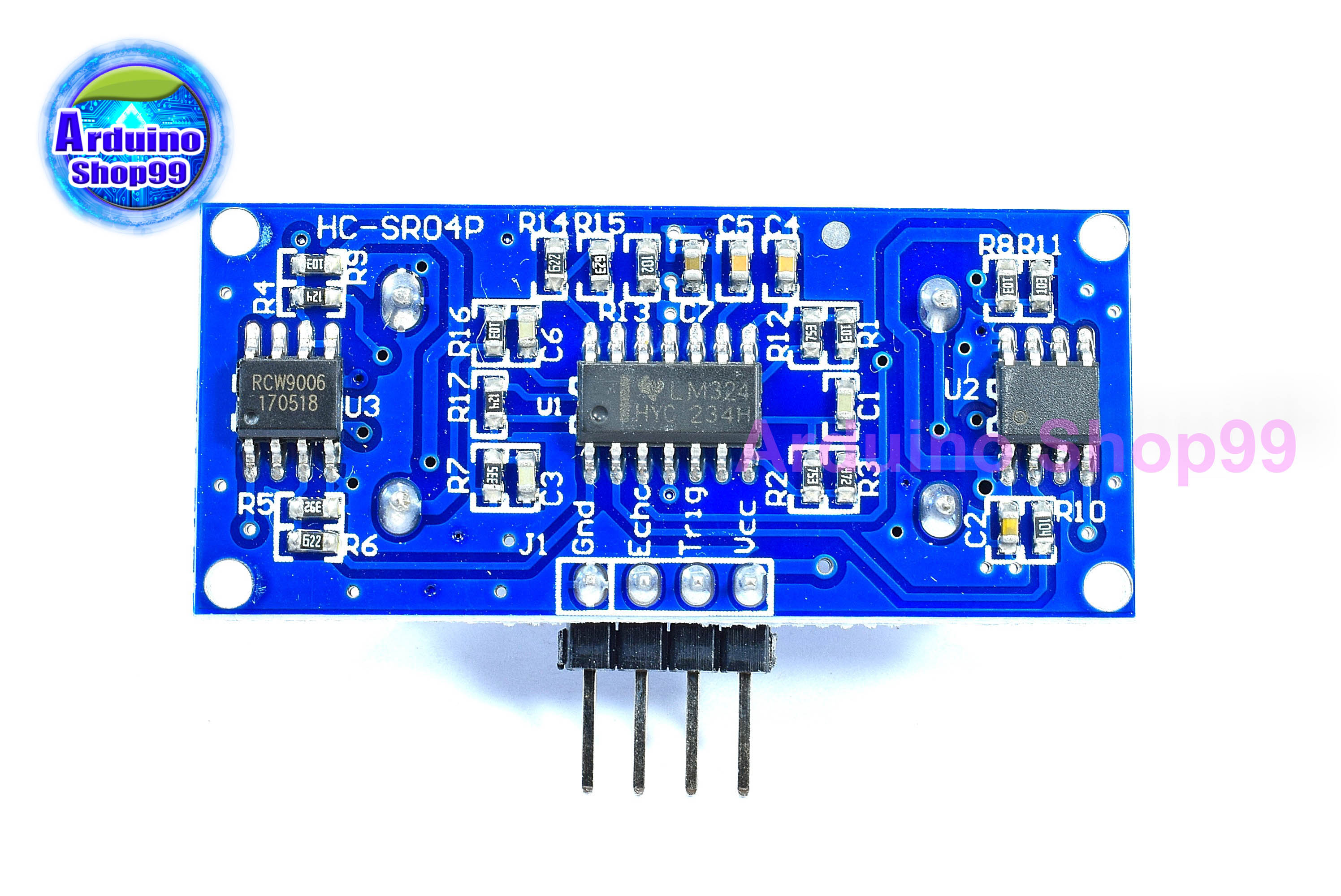
module HC-SR04P Ultrasonic ปรับปรุงจาก HC-SR04 ช่วงการวัด ประมาณ 2 cm ถึง 450 cm 5v
โมดูล HC-SR04P สำหรับวัดระยะห่างด้วยคลื่นอัลตราโซนิค (ใช้คลื่นเสียงความถี่ ประมาณ 40kHz) มีสองส่วนหลักคือ ตัวส่งคลื่นที่ทำหน้าที่สร้างคลื่นเสียงออกไปในการวัดระยะแต่ละครั้ง ("Ping") แล้วเมื่อไปกระทบวัตถุหรือสิ่งกีดขวาง คลื่นเสียงถูกสะท้อนกลับมายังตัวรับแล้วประมวลผลด้วยวงจรอิเล็กทรอนิกส์ภายในโมดูล ถ้าจับเวลาในการเดินทางของคลื่นเสียงในทิศทางไปและกลับ และถ้าทราบความเร็วเสียงในอากาศ ก็จะสามารถคำนวณระยะห่างจากวัตถุกีดขวางได้ 
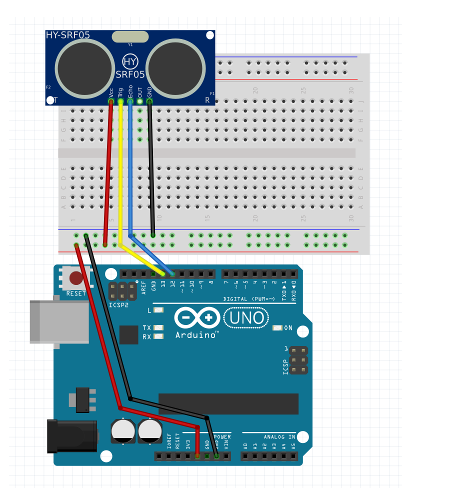
float trigPin = 13; // Trigger
float echoPin = 12; // Echo
float duration, cm, inches;
void setup() {
//Serial Port begin
Serial.begin (115200);
//Define inputs and outputs
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
// The sensor is triggered by a HIGH pulse of 10 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the signal from the sensor: a HIGH pulse whose
// duration is the time (in microseconds) from the sending
// of the ping to the reception of its echo off of an object.
pinMode(echoPin, INPUT);
duration = pulseIn(echoPin, HIGH);
// Convert the time into a distance
cm = (duration/2) / 29.1; // Divide by 29.1 or multiply by 0.0343
inches = (duration/2) / 74; // Divide by 74 or multiply by 0.0135
Serial.print(inches);
Serial.print("in, ");
Serial.print(cm);
Serial.print("cm");
Serial.println();
delay(250);
}
      |
| เงื่อนไขอื่นๆ |
|
| Tags |
วิธีการชำระเงิน

ชำระเงินผ่านธนาคาร
ชำระเงินด้วยการ Scan QR



สนธยา ใจผ่อง
063-xxxxxx-8
Accept All Banks | รับเงินได้จากทุกธนาคาร




สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
รวมภาษีมูลค่าเพิ่มแล้ว
➜ เลือกซื้อสินค้าเพิ่ม