


รายละเอียดสินค้า
| ข้อมูล |
น้ำหนัก
บาร์โค้ด
ลงสินค้า
อัพเดทล่าสุด
|
| รายละเอียดสินค้า |
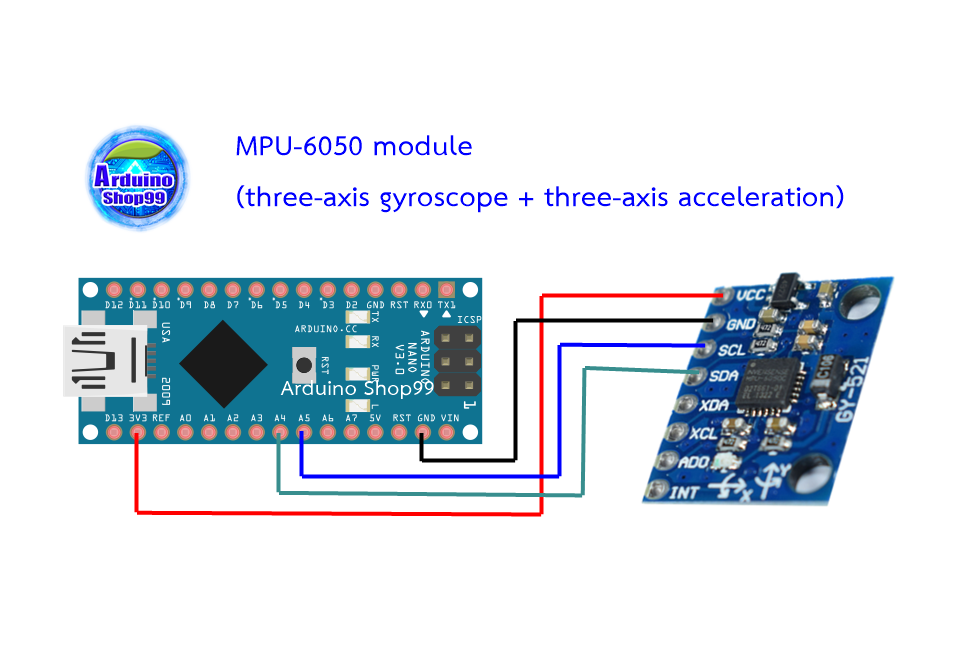
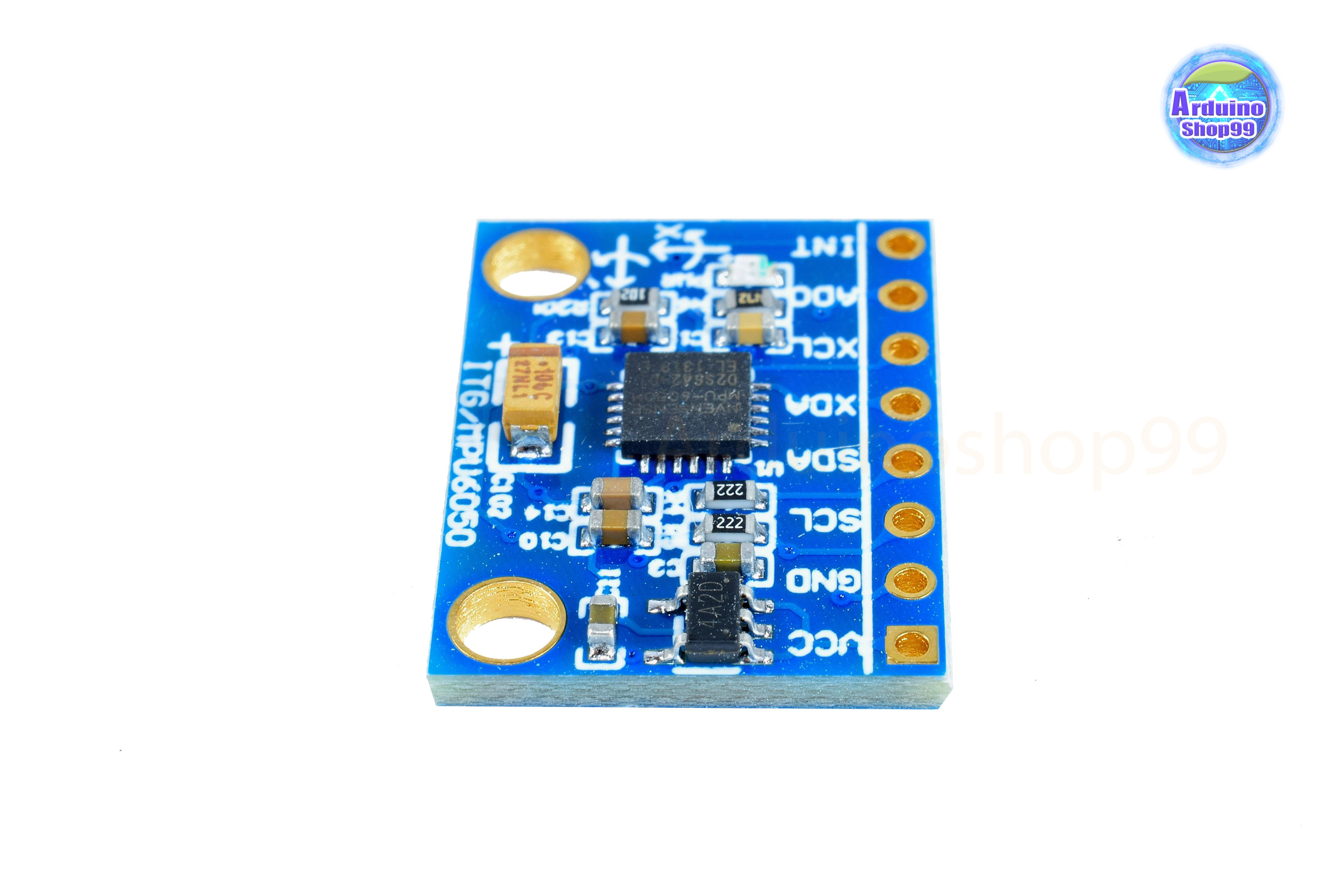
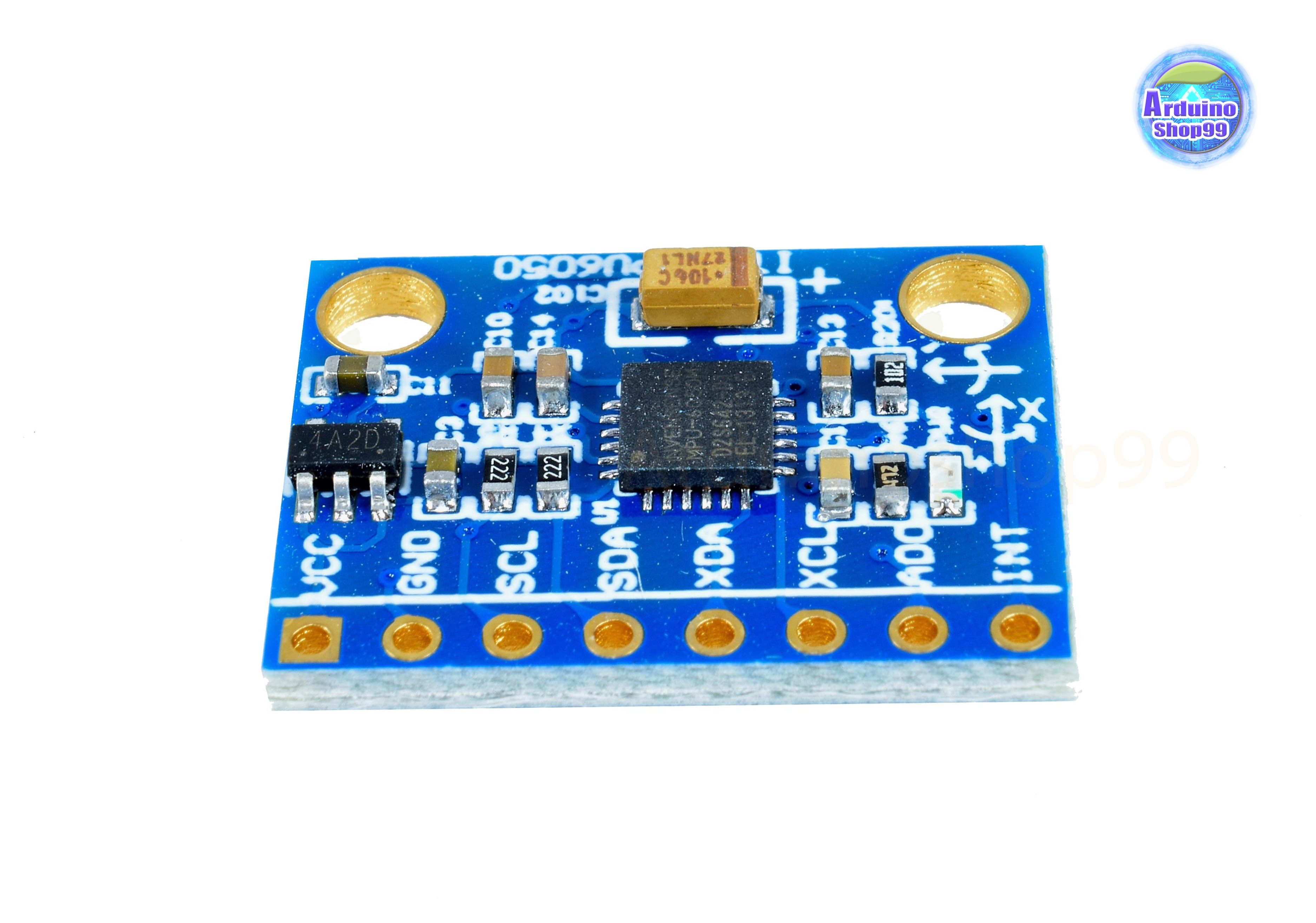
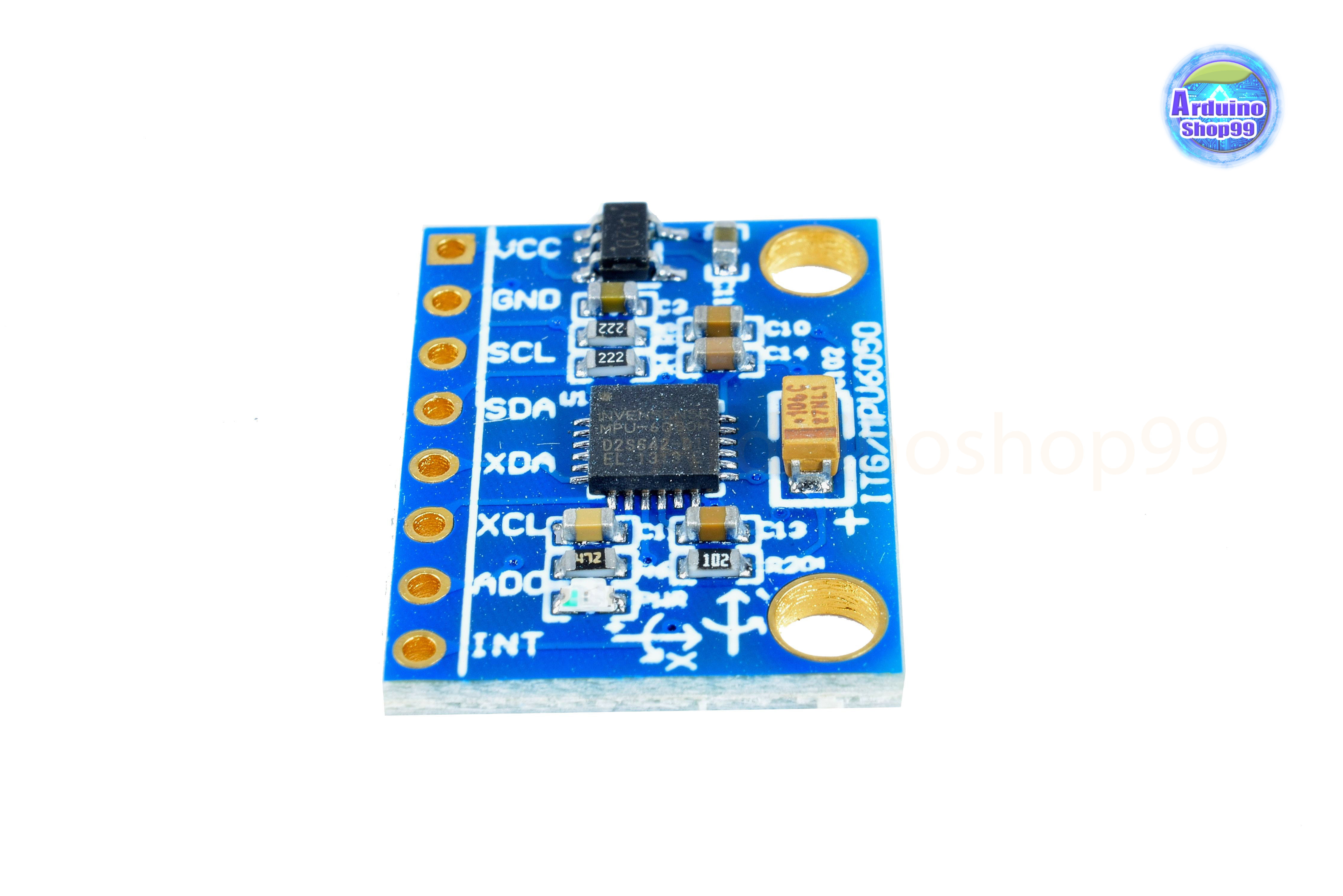
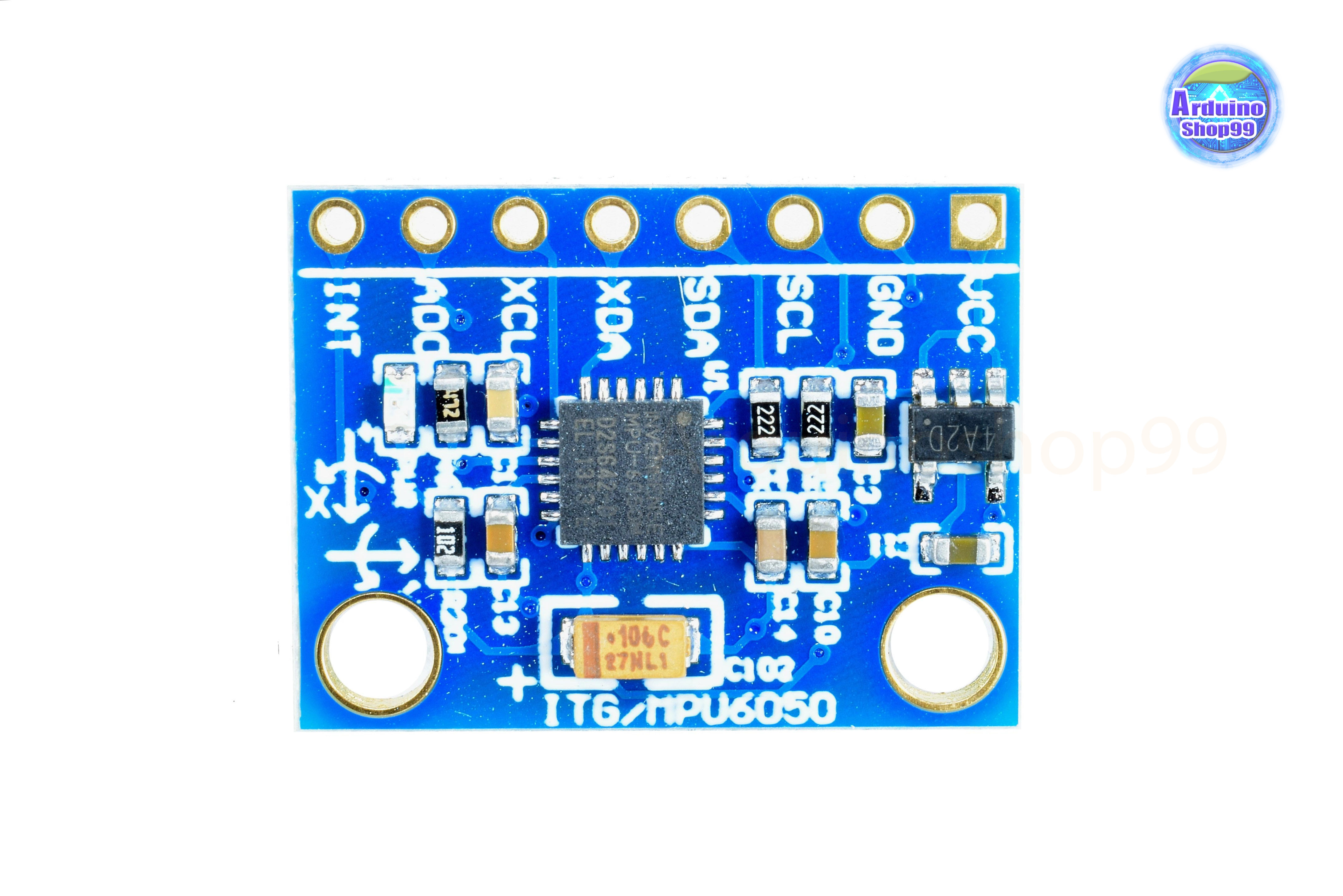
เซนเซอร์ GY-521 หรือ MPU 6050 6-axis สามารถวัดได้ 6 แกน 1. Accelerometer วัดความเร่ง 3 แกน 2. Gyroscope วัดความเร็วเชิงมุม 3 แกนโดยต่อแบบ i2cIntroduction:
MPU-6000 is the world's first 6-axis motion processing system. Compared to multi-component solutions, the MPU-6000 eliminates the problem of axial distinction when gyroscopes and accelerators are combined, thus reducing the amount of packaging space.
The MPU-6000 includes a 3-axis gyroscope, 3-axis accelerator, and includes a digital processor hardware acceleration (DMP) that can be connected to an accelerator, magnetic sensor, or other sensors via an I2C port. Second, the engine from the I2C master port outputs a complete 9-core fusion algorithm to the application as a single data stream.
InvenSense's motion processing database manages complex data for motion detection, reduces the load on the operating system for motion processing operations, and provides architected APIs for application development.
MPU-6000's speed range of full sensing is ± 250, ± 500, ± 1000 and ± 2000 ° / sec (dps), which tracks fast and slow motion, and programmable users can feel the fullness of the measurements. Is ± 2g, ± 4g ± 8g and ± 16g transmission, products can be transmitted via I2C up to 400kHz or SPI up to 20MHz.
The MPU-6000 can operate at different voltages with a supply voltage VDD 2.5V ± 5%, 3.0V ± 5%, or 3.3V ± 5%, and the VVDIO logic interface supplies 1.8V ± 5% MPU-. The 6000 comes in a 4x4x0.9mm package (QFN) and is an industry revolutionary model. Other features include a built-in temperature sensor and an oscillator with only ± 1% variation in the operating environment.
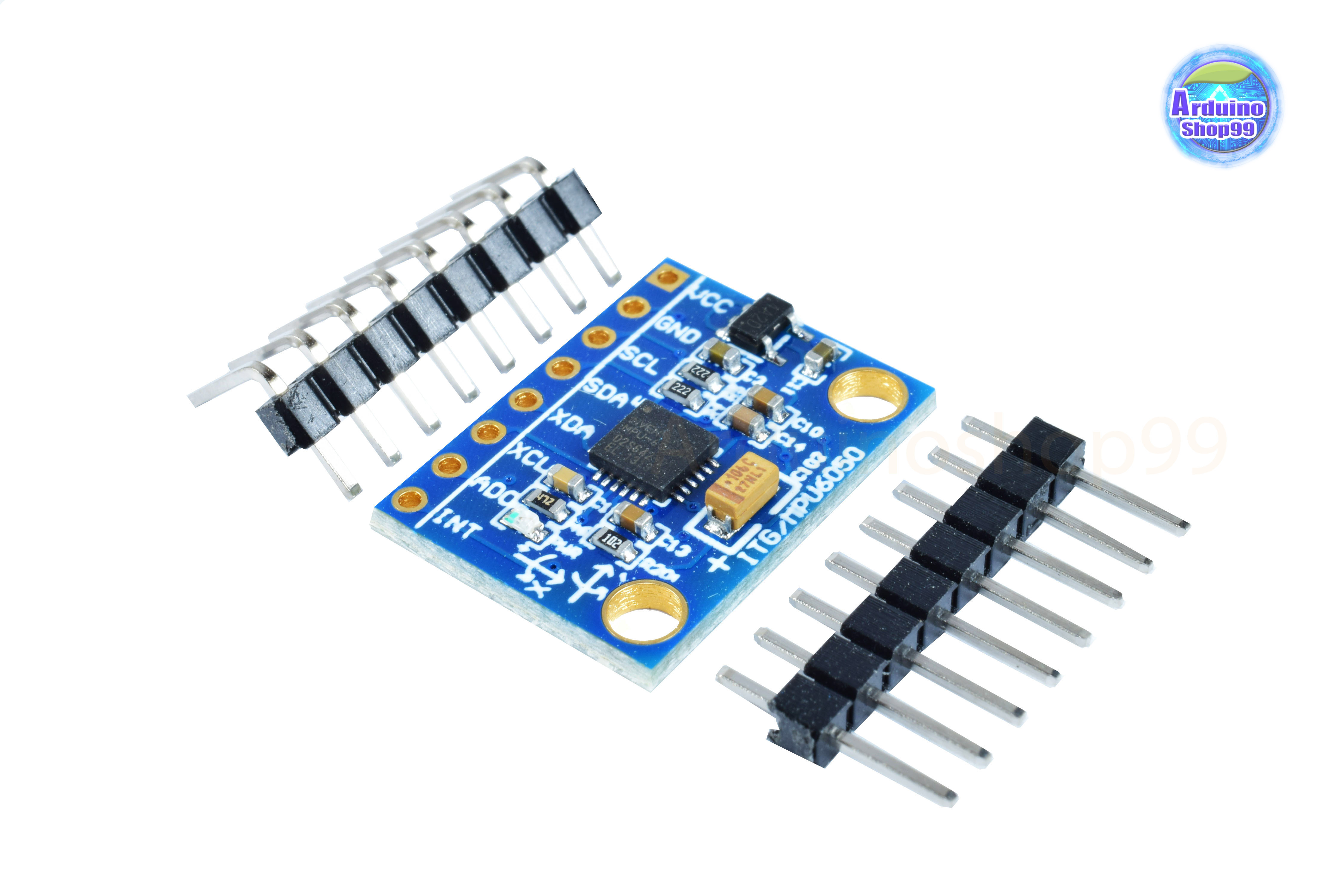
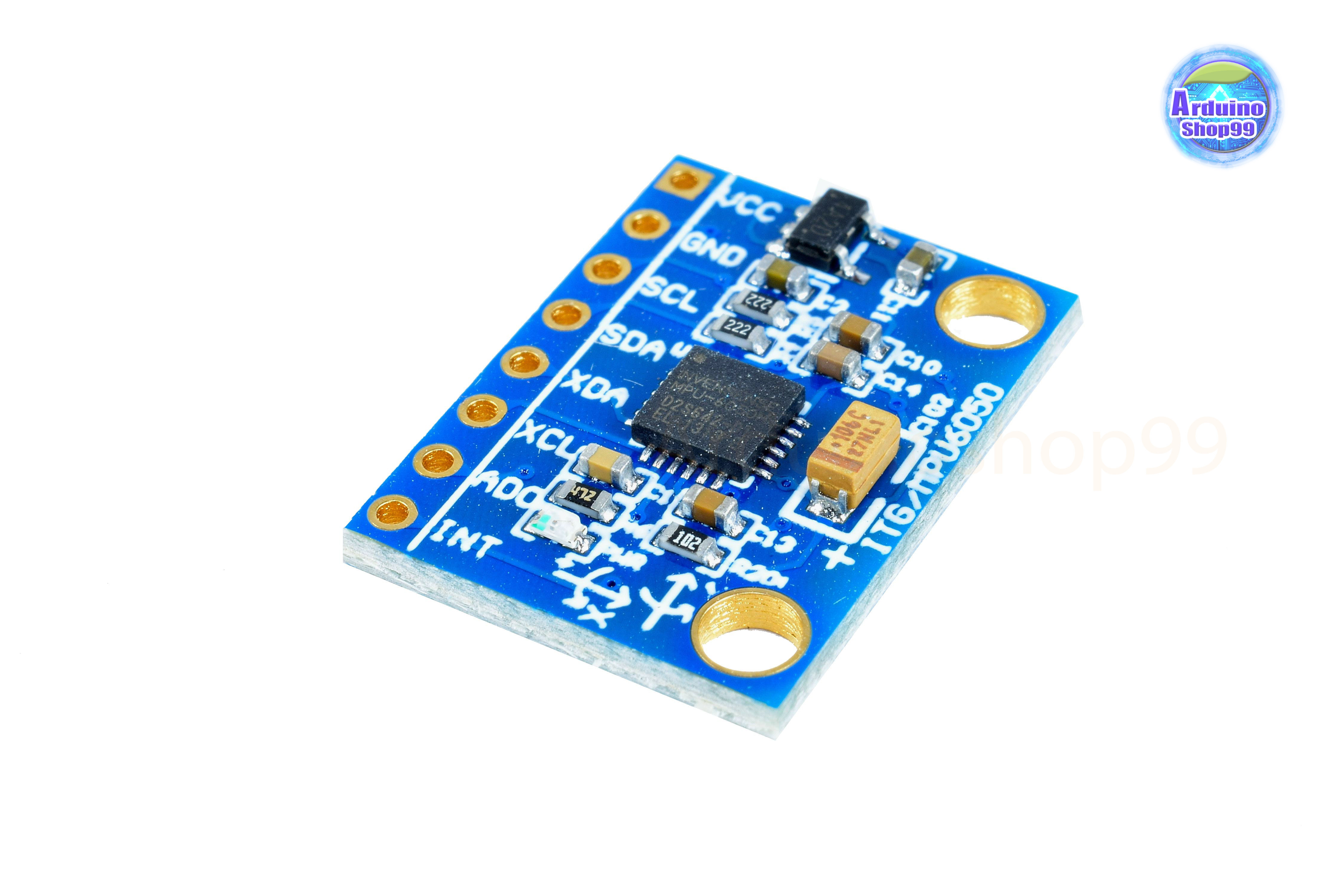
Characteristics:
1.Chip: MPU-6050
2.Power supply: 3v-5V power
3. Gyroscope: + 250 500 1,000 2000 ° / s
4. Acceleration: ± 2 ± 4 ± 8 ± 16 g
5.Communication: standard IIC communication agreement.
6. Built-in 16 bit AD converter chip, 16 bits of data output.
7.Pin spacing 2.54mm
 #include "Wire.h"
#include "math.h"
const int MPU=0x68;
int16_t AcX,AcY,AcZ,Tmp,GyX,GyY,GyZ;
double pitch,roll;
void setup(){
Wire.begin();
Wire.beginTransmission(MPU);
Wire.write(0x6B);
Wire.write(0);
Wire.endTransmission(true);
Serial.begin(9600);
}
void loop(){
Wire.beginTransmission(MPU);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU,14,true);
int AcXoff,AcYoff,AcZoff,GyXoff,GyYoff,GyZoff;
int temp,toff;
double t,tx,tf;
//Acceleration data correction
AcXoff = -950;
AcYoff = -300;
AcZoff = 0;
//Temperature correction
toff = -1600;
//Gyro correction
GyXoff = 480;
GyYoff = 170;
GyZoff = 210;
//read accel data
AcX=(Wire.read()<<8|Wire.read()) + AcXoff;
AcY=(Wire.read()<<8|Wire.read()) + AcYoff;
AcZ=(Wire.read()<<8|Wire.read()) + AcYoff;
//read temperature data
temp=(Wire.read()<<8|Wire.read()) + toff;
tx=temp;
t = tx/340 + 36.53;
tf = (t * 9/5) + 32;
//read gyro data
GyX=(Wire.read()<<8|Wire.read()) + GyXoff;
GyY=(Wire.read()<<8|Wire.read()) + GyYoff;
GyZ=(Wire.read()<<8|Wire.read()) + GyZoff;
//get pitch/roll
getAngle(AcX,AcY,AcZ);
//send the data out the serial port
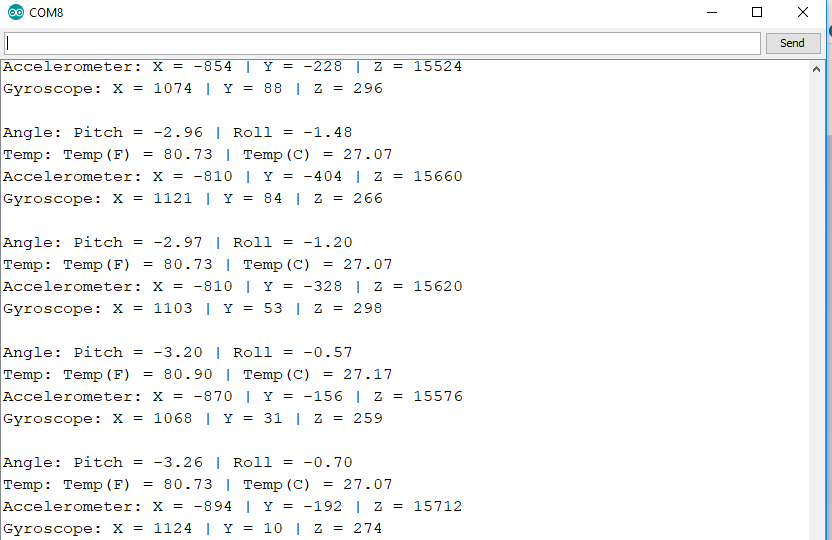
Serial.print("Angle: ");
Serial.print("Pitch = "); Serial.print(pitch);
Serial.print(" | Roll = "); Serial.println(roll);
Serial.print("Temp: ");
Serial.print("Temp(F) = "); Serial.print(tf);
Serial.print(" | Temp(C) = "); Serial.println(t);
Serial.print("Accelerometer: ");
Serial.print("X = "); Serial.print(AcX);
Serial.print(" | Y = "); Serial.print(AcY);
Serial.print(" | Z = "); Serial.println(AcZ);
Serial.print("Gyroscope: ");
Serial.print("X = "); Serial.print(GyX);
Serial.print(" | Y = "); Serial.print(GyY);
Serial.print(" | Z = "); Serial.println(GyZ);
Serial.println(" ");
delay(333);
}
//convert the accel data to pitch/roll
void getAngle(int Vx,int Vy,int Vz) {
double x = Vx;
double y = Vy;
double z = Vz;
pitch = atan(x/sqrt((y*y) + (z*z)));
roll = atan(y/sqrt((x*x) + (z*z)));
//convert radians into degrees
pitch = pitch * (180.0/3.14);
roll = roll * (180.0/3.14) ;
}
         |
| เงื่อนไขอื่นๆ |
|
| Tags |
วิธีการชำระเงิน

ชำระเงินผ่านธนาคาร
ชำระเงินด้วยการ Scan QR



สนธยา ใจผ่อง
063-xxxxxx-8
Accept All Banks | รับเงินได้จากทุกธนาคาร




สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
รวมภาษีมูลค่าเพิ่มแล้ว
➜ เลือกซื้อสินค้าเพิ่ม