


รายละเอียดสินค้า
| ข้อมูล |
น้ำหนัก
บาร์โค้ด
ลงสินค้า
อัพเดทล่าสุด
|
| รายละเอียดสินค้า |
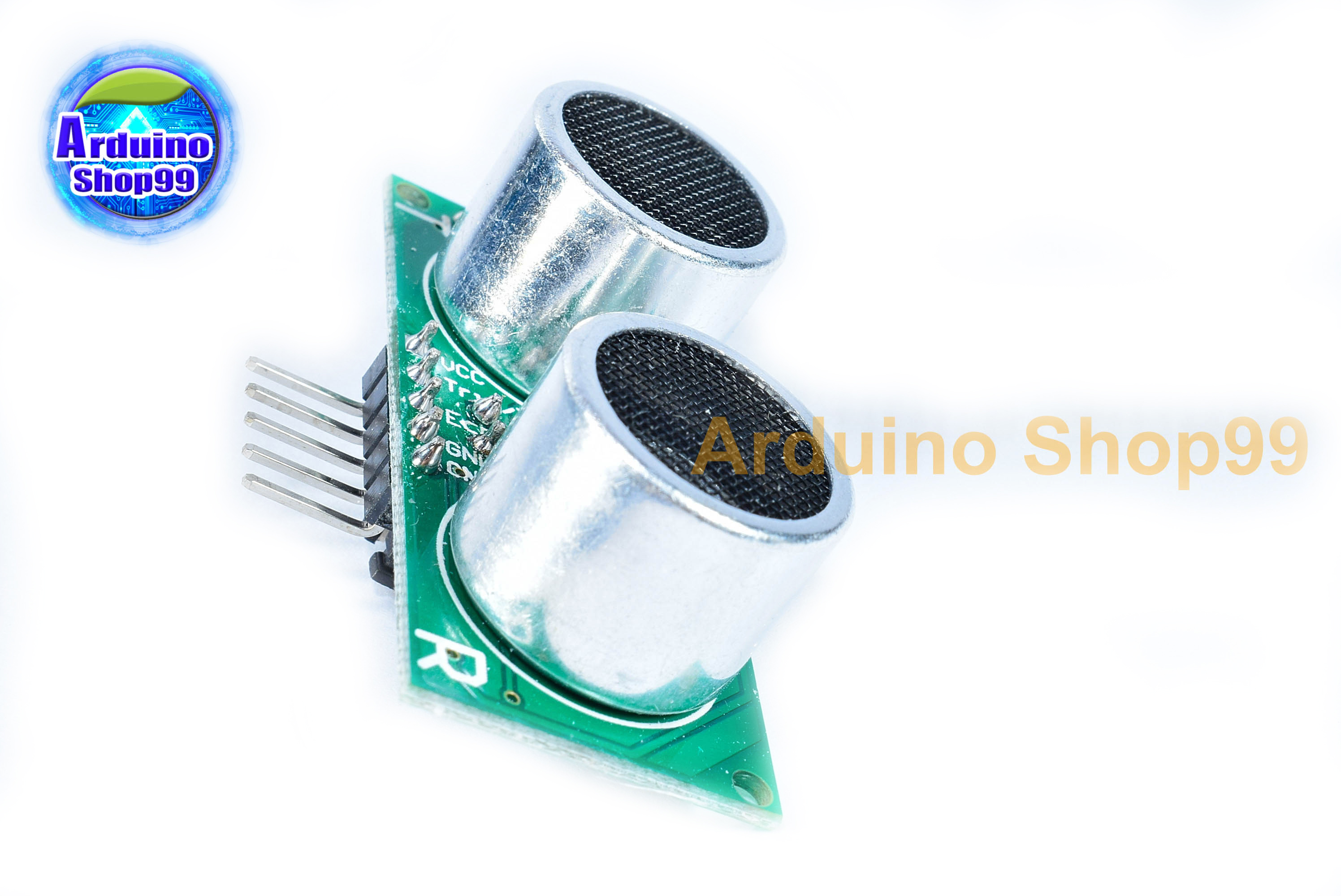
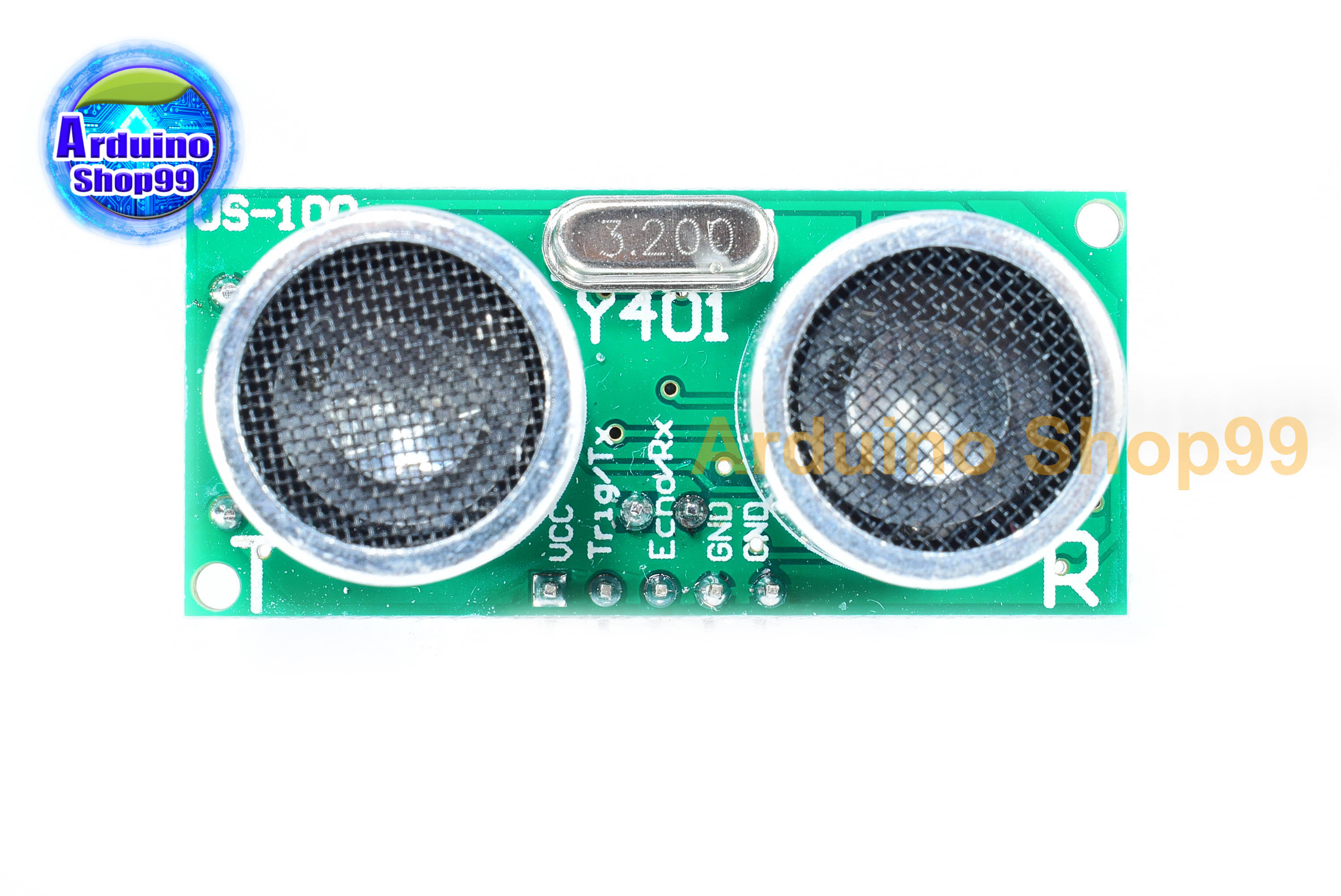
US-100 ultrasonic sensor
ภายในตัวมีเซ็นเซอร์วัดอูณหภูมิเพิ่มขึ้นมา ทำให้สามารถวัดค่าได้แม่นยำมาก
Specifications Power & Logic Voltage: DC 2.4V~5.5V
Current: 2mA
Operating Temperature: -20~ + 70º
Measuring Angle: Less than 15º
Detection Distance: 2cm – 450 cm
Accuracy: 0.3cm +1%
Sensor dimensions (excluding header): 45 x 20mm
Weight: 9g
http://tinkbox.ph/sites/mytinkbox.com/files/downloads/US_100_ULTRASONIC_SENSOR_MODULE.pdf  Code: // Prueba de medidas de distancia y temperatura con US-100 en modo serie
// Por RafaG, 2014
#include ;
const int US100_TX = 2;
const int US100_RX = 3;
// Instancia nuevo canal serie
SoftwareSerial puertoUS100(US100_RX, US100_TX);
unsigned int MSByteDist = 0;
unsigned int LSByteDist = 0;
unsigned int mmDist = 0;
int temp = 0;
void setup() {
Serial.begin(9600);
puertoUS100.begin(9600);
}
void loop() {
puertoUS100.flush(); // limpia el buffer del puerto serie
puertoUS100.write(0x55); // orden de medición de distancia
delay(500);
if(puertoUS100.available() >= 2) // comprueba la recepción de 2 bytes
{
MSByteDist = puertoUS100.read(); // lectura de ambos bytes
LSByteDist = puertoUS100.read();
mmDist = MSByteDist * 256 + LSByteDist; // distancia
if((mmDist > 1) && (mmDist < 10000)) // comprobación de la distancia dentro de rango
{
Serial.print("Distancia: ");
Serial.print(mmDist, DEC);
Serial.println(" mm");
}
}
puertoUS100.flush(); // limpia el buffer del puerto serie
puertoUS100.write(0x50); // orden de medición de distancia
delay(500);
if(puertoUS100.available() >= 1) // comprueba la recepción de 1 byte
{
temp = puertoUS100.read(); // lectura del byte
if((temp > 1) && (temp < 130)) // comprobación de rango válido
{
temp -= 45; // corrige offset de 45º
Serial.print("Temperatura: ");
Serial.print(temp, DEC);
Serial.println(" ºC.");
}
      |
| เงื่อนไขอื่นๆ |
|
| Tags |
วิธีการชำระเงิน

ชำระเงินผ่านธนาคาร
ชำระเงินด้วยการ Scan QR



สนธยา ใจผ่อง
063-xxxxxx-8
Accept All Banks | รับเงินได้จากทุกธนาคาร




สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
รวมภาษีมูลค่าเพิ่มแล้ว
➜ เลือกซื้อสินค้าเพิ่ม